WORMS: Field-Reconfigurable Lunar Robots

The Walking Oligomeric Robotic Mobility System (WORMS) is an architecture for field-reconfigurable lunar robots, where the mobility capability to operate on the lunar terrain emerges from the integration of a small (‘oligomeric’) set of identical, articulating ‘worm' robots with selected Accessories and Species Modules. Mimicking arms, legs and backbones, WORMS can be configured into diverse walking robots with payload capacity from kilograms to tons. WORMS received the Best Technical Paper Award from the 2022 NASA BIG Idea Challenge, the M. Charles Fogg Best Conference Paper Award at the 2023 IEEE Aerospace Conference and the team was invited by Jeff Bezos to demonstrate WORMS at the 2024 Amazon MARS conference.
WORMS was invented by a MIT Space Resources Workshop team led by George Lordos in response to NASA's 2022 BIG Idea Challenge. The central strategic objective of the architecture was to meet a diverse array of lunar robotics needs while optimizing their long-term logistics. Each fully-self-contained 'Worm' robot resembles a robotic limb and has a battery, radio and avionics, and, in the current version, 3 degrees of freedom. All Worms participate in the same Robotic Operating System 2 network and terminate in androgynous Universal Interface Blocks which support mix-and-match interconnection with Accessory elements of the architecture including robot bodies, shoes, tools, or Species modules that perform advanced sensing or actuating functions. The function and behavior of each Worm robot is set depending on what is connected to it, enabling plug-and-play assembly of software-defined robot configurations for highly diverse lunar missions, including exploring lava tubes, delivering payloads up or down very steep slopes, remotely maintaining a fission surface power system or setting up charging stations for other rovers.
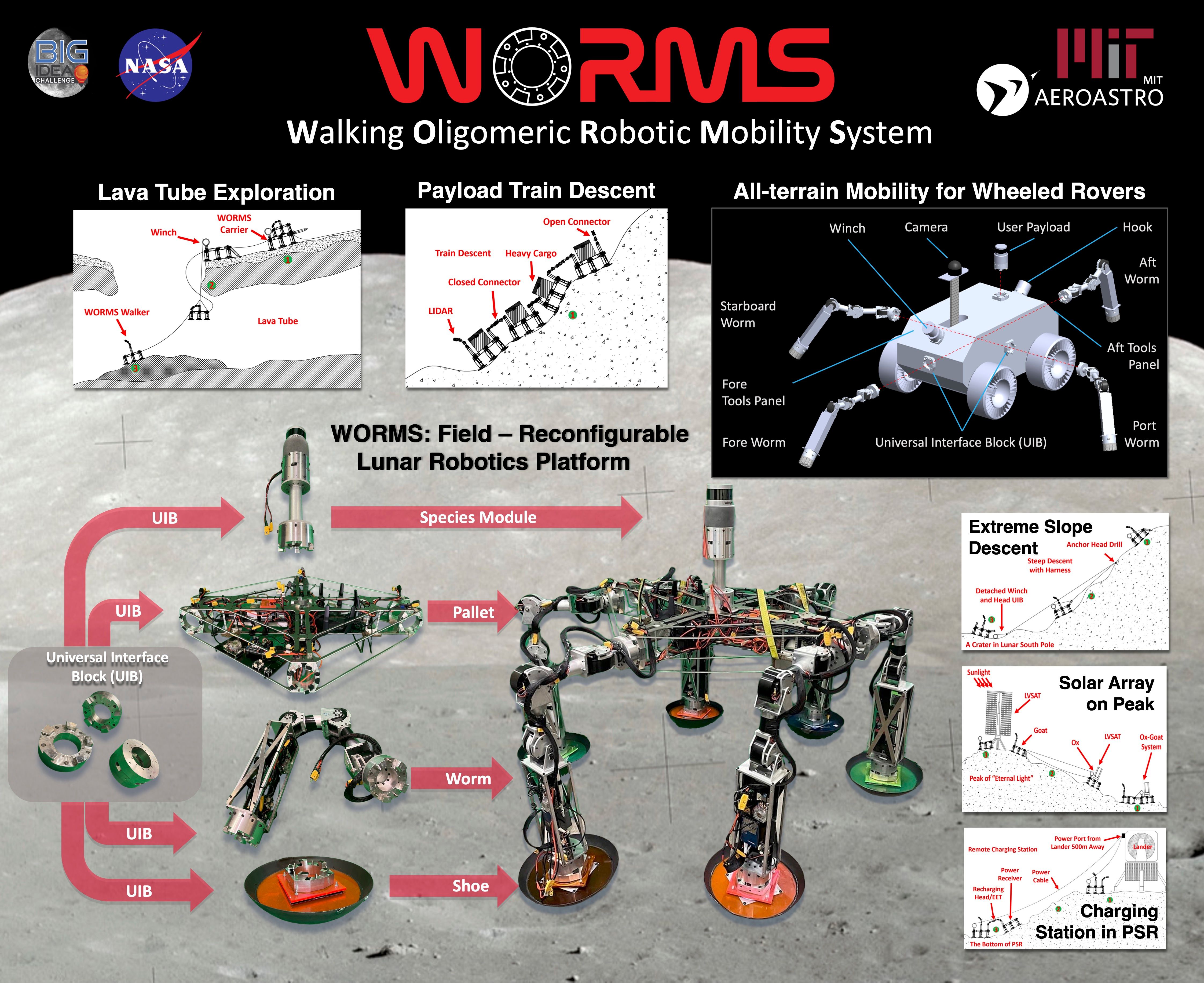
Figure: The Walking Oligomeric Robotic Mobility System (WORMS) is a modular platform for field-reconfigurable lunar robotics. Each limb is an independent 10kg robot with energy storage, avionics, power distribution and actuators. Accessories, such as shoes or pallets/chassis, are simple mechanical parts, with chassis-type accessories also hosting a power-sharing bus, while Species modules add specialized sensing, communicating or actuating capabilities. Every element of the architecture is fitted with one or more Universal Interface Block (UIB) for plug-and-play rapid assembly and disassembly of different robot configurations in the field. Our proof of concept hexapod shown here could carry payloads of ~4X its own weight on the Moon. Any configuration is possible if a diverse selection of Accessories and Species modules is available.
Using this architecture, NASA's Artemis crews will be able to rapidly and easily configure a variety of walking robots, fixed robotic arms or attach legs to a module for a one-off relocation, in support of their many science, exploration and logistical tasks. With a sufficient stock of simple Worm robotic limbs and a diverse selection of Accessories and Species modules, the architecture results in high availability of complex multi-Worm robots to complete missions, ability to 'repair' a robot in the field in minutes by simply replacing a failed Worm limb, the capability to 'beam' entirely new robot configurations to the Moon and have them fielded within hours, and streamlined manufacturing and logistics of the same identical simple Worm robot.
A full-scale 110kg hexapod prototype was built between February - October 2022 and successfully demonstrated in the field at Lucerne Valley, CA for the 2022 NASA BIG Idea Challenge, where it received the Best Technical Paper Award. The technical paper, technical poster and presentation slides are available on the 2022 NASA BIG Idea challenge website. The final presentation and Q&A livestream video is here - the MIT WORMS talk starts at 2h10m.
Video: WORMS Development Status, October 2022
A WORMS conference paper was subsequently presented at the 2023 IEEE Aerospace Conference in March 2023, where it received the M. Charles Fogg Best Conference Paper and Best Paper in Track 13 Awards.
In March 2024, a new iteration of WORMS was demonstrated at the Amazon MARS conference. The sandpit demo included a quadruped WORMS robot with a walking gait bio-inspired from turtles and two types of shoes, as well as a robotic arm with a digger attachment.
Video: A WORMS Turtle-bot and Robotic Arm Demonstrated at Amazon MARS, March 2024
My colleagues for the 2022 NASA BIG Idea project were Michael Brown (deputy team lead and mechanical lead), Yang Chen, Cesar Meza, Jacob Rodriguez (autonomy lead), Alex Miller, Aditya Mehrotra, Prajwal Mahesh, Cormac O'Neill, Aileen Liao, Brooke Bensche, Sharmi Shah, Kir Latyshev, Jessica Rutledge, Cynthia Cao, Fatema Zaman, Steven Reyes, Tomas Cantu, Diego Rivero, Katherina Sapozhnikov, Anna Mokkapati, Chiara Rissola (Carnegie Mellon University), Fiona Lin, John Zhang.
My colleagues for the 2024 Amazon MARS project were Jacob Rodriguez (deputy team lead), Juan Alvarez, Alan Cao, Ben Carlson, Suchitha Channapatna, Chloe Gentgen, Trevor Johst, AZ Krebs, and Marc Vidal.
This project would not have been possible without everyone's hard work. My role with WORMS was team lead, lead system architect, lead systems engineer and project manager.
Our MIT Faculty Advisors for the BIG Idea project were Prof. Jeffrey Hoffman, Prof. Olivier de Weck, Prof. David Trumper, Prof. Sangbae Kim and our external mentor was Prof. Wendell Chun of University of Denver. Our industry partners were Boston Dynamics, MassRobotics, Robots5.
I am grateful to the National Institute of Aerospace for organizing NASA’s 2022 BIG Idea Challenge and the WORMS project’s funding sponsors: NASA’s Space Technology Mission Directorate / Game Changing Development Program; NASA’s National Space Grant College and Fellowship Program; the Massachusetts Institute of Technology; and the Massachusetts Space Grant. Two researchers were supported by the National Science Foundation Graduate Research Fellowship under Grant No. 2141064 and by the Fannie and John Hertz Foundation.
I would also like to thank Aleks Siemenn, Hanfei Cui, Isabella Golemme, Jolie Bercow, Juan Salazar, Stephanie Howe, and Zeyad Al Awwad for their design contributions, and Stephanie Sjoblom for support with presentation preparations.
Finally, my thanks go to Jeff Bezos and his Amazon MARS conference team for inviting me to demonstrate WORMS at their annual event.
